ロボット支援手術を可能にする接続性ソリューション
ロボティクスとロボット支援による外科手術
近代的な手術用ロボットはヘルスケア4.0の中核を成しており、外科医がこれまでにない精度と制御で低侵襲手術を行うことを可能にします。ロボット支援手術では、人間の外科医がロボットアームに取り付けられた高度な器具を操作し、通常は高精細な3Dカメラの助けを借りて小さな切開部から手術を行います。手の震えを除去し、動きをスケーリングすることで、da Vinci®システムのようなロボットは、手作業では困難な非常に繊細な操作を行うことができます。その利点には、患者の身体的負担の軽減、小さな傷跡、そして回復の早さがあります。手術用ロボットの導入は拡大を続けており、2021年時点、世界中で1,000万件以上のロボット支援手術が実施されています(Robotic Surgery Statistics and Facts (2025))。
接続性とデータの必要性
手術用ロボットは、さまざまな信号やデータの流れに依存しています。外科医の操作コンソールは、制御コマンドを送信し、リアルタイムの映像やセンサーのフィードバックをほぼゼロ遅延で受信する必要があります。高帯域幅の接続は、手術部位からのHD映像を伝送し、制御リンクは精密な動きを伝えます。遅延や干渉があると手術に支障をきたす可能性があるため、手術用ロボットにはEMI(電磁干渉)シールド付きのケーブルアッセンブリが使用され、手術室内の多数の電気機器の中でも信号の完全性を保ちます。そのため、設計者はノイズのない映像伝送のためにシールド付き細線同軸コネクタを、モーター駆動信号を瞬時に供給するために堅牢な電源内部接続を採用しています。
次世代の手術システムでは、遠隔手術を可能にするためにネットワーク接続(5G)を活用する取り組みが進められており、極めて信頼性の高いデータ伝送が求められています。
コネクタ設計上の技術的課題
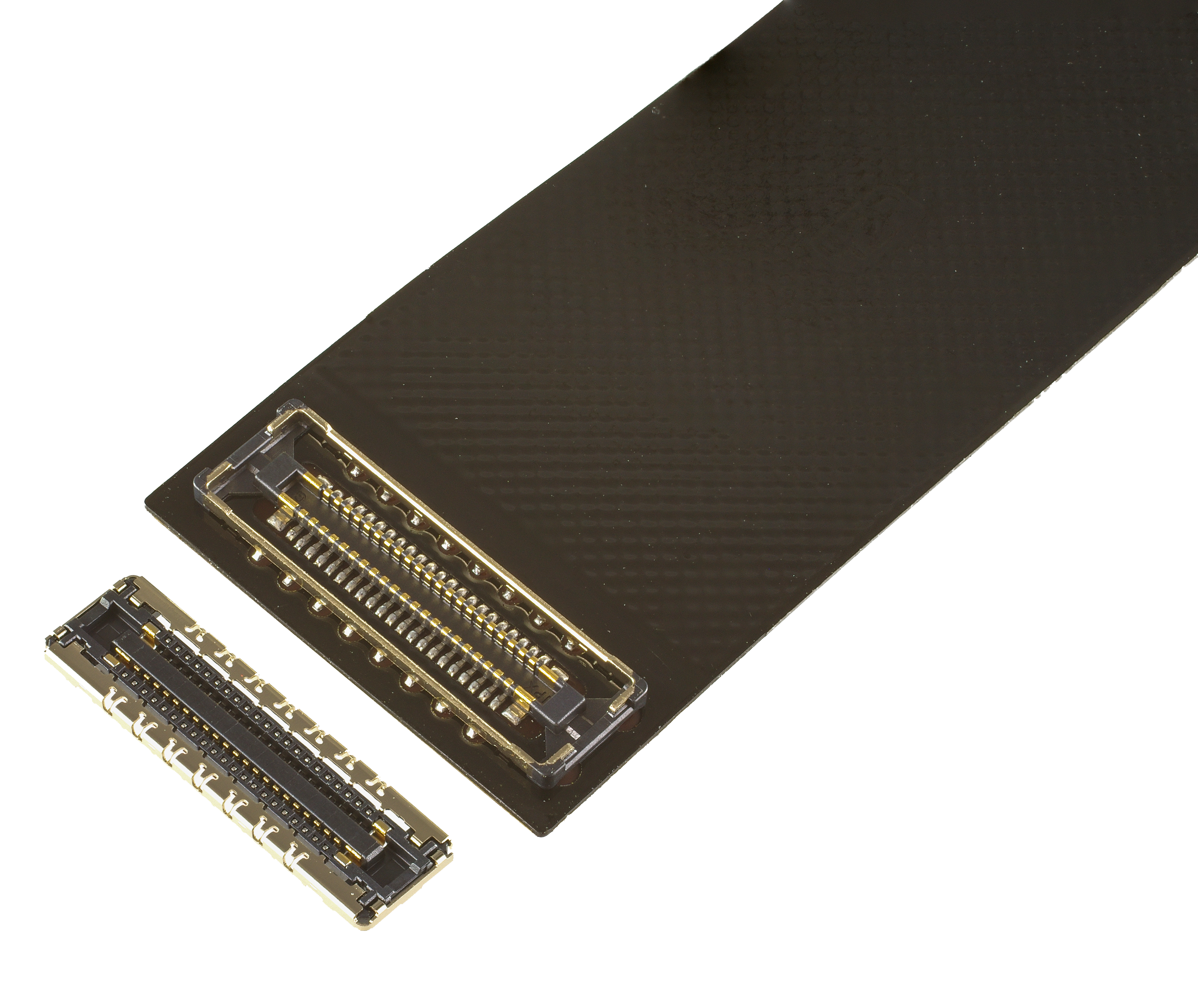
医療分野におけるロボティクスは、独自のコネクタ要件を提示します。各ロボットアームやツールのインターフェースには、電力、データ、映像、さらには流体制御のための複数のコネクタが搭載されることがあります。これらのコネクタは、高精細映像や高周波センサーデータをサポートするために高速かつ高信頼性である必要があり、動作中でも安定して機能しなければなりません。振動、動き、電気ノイズは常に存在する要因であり、I-PEX CABLINE® 細線同軸シリーズのようなコネクタは、完全にシールドされた高速データリンクと確実なラッチ機構を備えることで、切断の可能性やEMI(電磁干渉)の問題を最小限に抑えます。
また、I-PEX NOVASTACK® のような基板対基板コネクタは、コンパクトなロボット関節内の制御基板同士を接続し、モジュール間でギガビット信号を伝送することが可能です。

頻繁な接続と滅菌処理
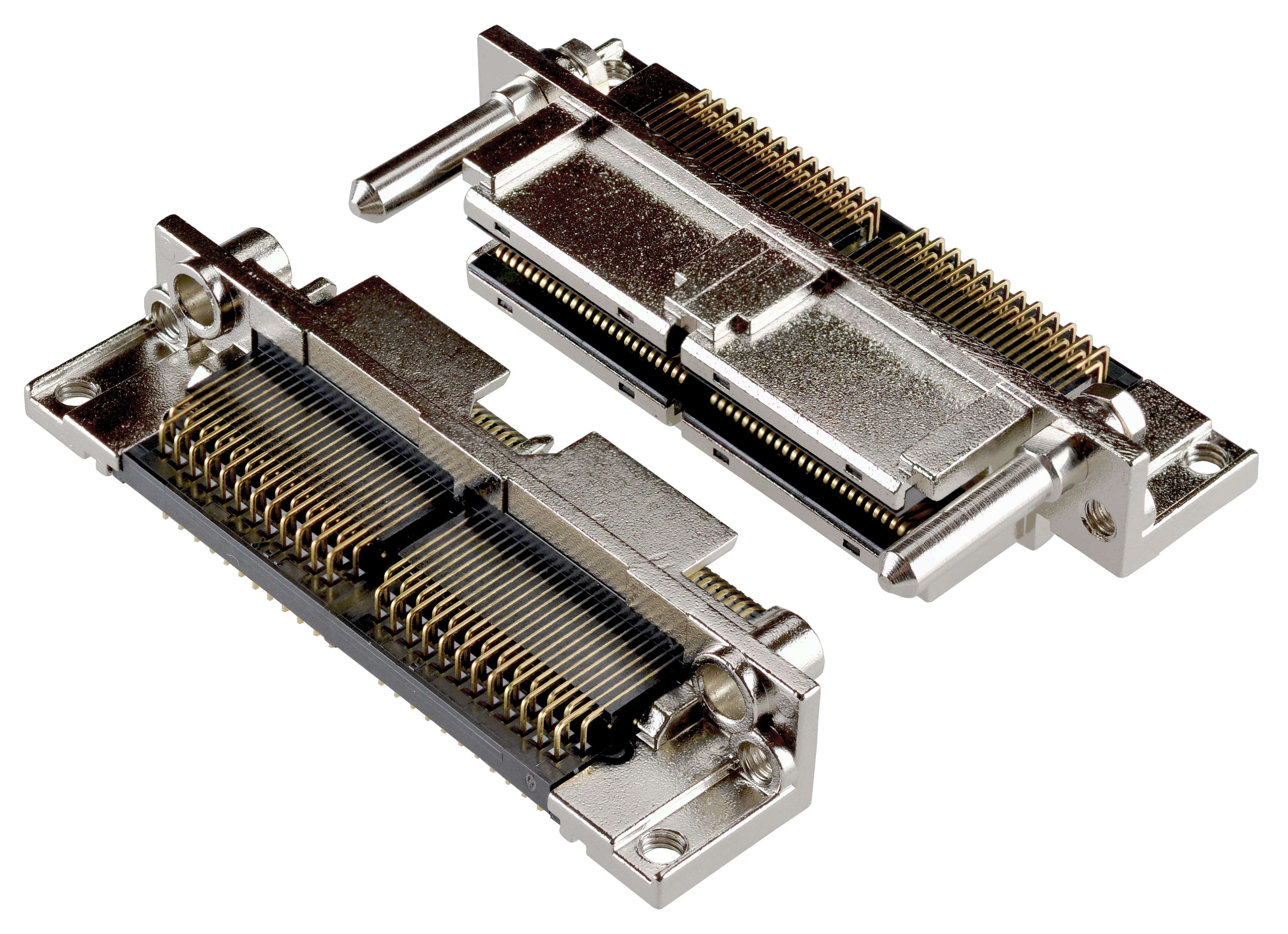
もうひとつの課題は、手術器具やアクセサリがロボットに接続されるインターフェースでの頻繁な接続・取り外し(嵌合)です。これらのドッキング接続は、手術ごとや器具の交換時に毎回行われる可能性があります。ロボティクス向けに設計されたI/Oコネクタ(例:I-PEX MINIDOCK™シリーズ)は、堅牢なハウジングとガイドピンなどの位置合わせ機構を備えており、外科医や看護師が手術中に器具を交換しても、迅速かつ確実に接続できるようになっています。これらのコネクタは数千回の接続サイクルに耐える設計で、日常的な使用にも対応可能です。さらに、滅菌処理にも耐えられるように設計されており、オートクレーブ(高温高圧蒸気滅菌)に直接対応するものや、ロボット器具に滅菌済みの使い捨てカバーを使用できるようになっているものもあります。高温蒸気滅菌や過酷な消毒処理に耐えるコネクタ(手術用ステンレス鋼や高耐熱性ポリマーなどの素材を使用)は、手術環境において非常に重要です。
要するに、ロボット支援手術には高帯域幅の性能と絶対的な信頼性を備えたコネクタソリューションが求められます。カメラやセンサー用のEMI(電磁干渉)シールド付き高速接続から手術器具用の高耐久ドッキングコネクタまで、適切なインターコネクト(接続部品)が手術用ロボットの安定した動作を支えます。CABLINE®、NOVASTACK®、MINIDOCK™といった専用コネクタシリーズを活用することで、設計技術者は外科医にシームレスな操作性を提供し、患者には、より安全で低侵襲な治療結果をもたらすロボット手術システムを構築することができます。