在医疗4.0中实现机器人辅助手术的连接解决方案
机器人技术和机器人辅助手术
现代手术机器人是医疗4.0的基石,使外科医生能够以前所未有的精确度和控制力进行微创手术。在机器人辅助手术中,外科医生在高清3D摄像头的帮助下,通过微小的切口操作安装在机械臂上的先进器械。通过过滤手部震颤和刻板动作,像达芬奇®手术系统这样的机器人可以实现手工难以完成的极其精细的操作。其优势包括减少患者创伤、缩小疤痕以及加速恢复。手术机器人的应用持续增长——截至2021年,全球已完成超过一千万例机器人辅助手术(Robotic Surgery Statistics and Facts (2025)).
连接和数据需求
手术机器人依赖大量信号和数据流。外科医生的控制台必须以近乎零延迟传输控制指令,并接收实时视频和传感器反馈。高带宽连接传输来自手术部位的高清视频,而控制链路则传递精确的动作。任何延迟或干扰都可能危及手术,因此手术机器人采用电磁干扰屏蔽的电缆组件,以保持在手术室的众多电气设备的信号完整性。于是设计人员使用带屏蔽功能的极细同轴线连接器来实现无噪声的成像传输,并采用坚固的电源互连以即时传递电机驱动信号。
下一代手术系统还在探索网络连接(甚至5G),以实现远程手术,这对数据传输的可靠性提出了极高要求。
连接器设计挑战
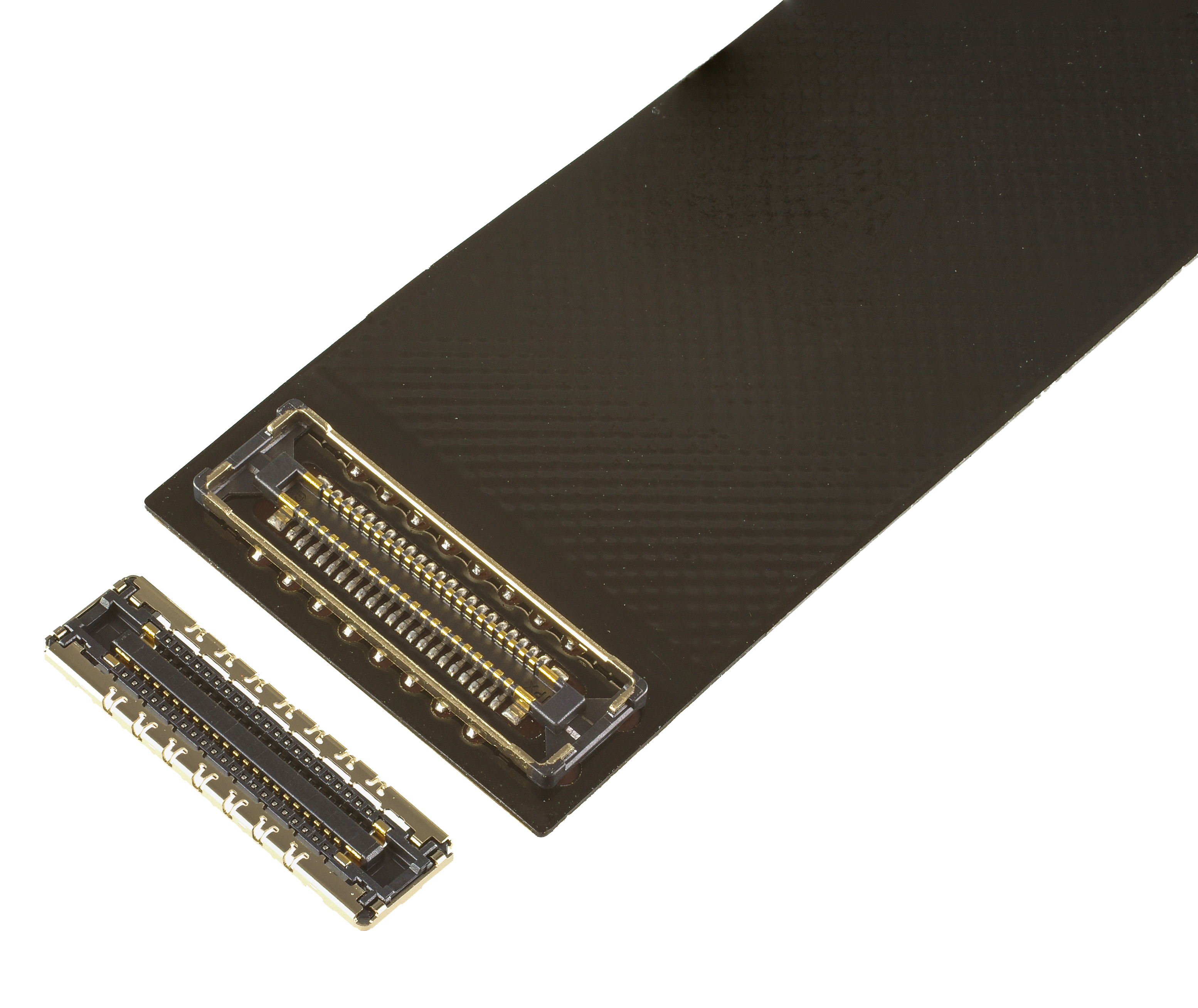
医疗机器人对连接器提出了独特的要求。每个机械臂或工具接口可能包含多个用于电源、数据、成像,有时甚至流体的连接器。这些连接器必须具备高速性能(以支持高清成像和高频传感器数据)并在运动中保持高可靠性。振动、运动和电气噪声是持续存在的因素——像 I-PEX CABLINE® 极细同轴线系列这样的连接器通过提供全屏蔽、高数据速率的连接以及安全锁扣,最大限度地减少连接断开或电磁干扰问题。内部板对板连接器如 I-PEX NOVASTACK® 可在紧凑的机器人关节内连接控制板,在模块之间传输千兆信号。

频繁插拔和消毒
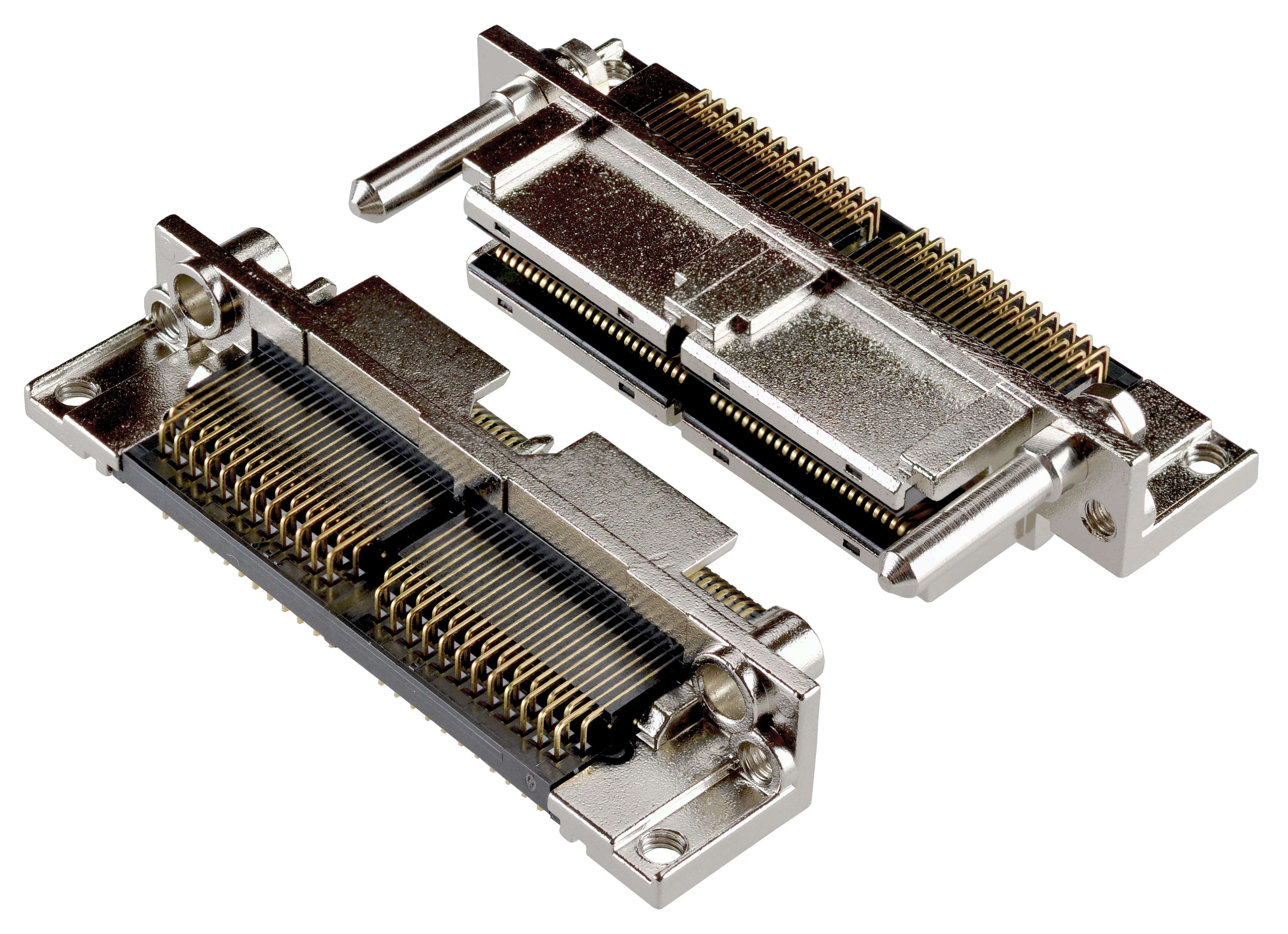
另一个挑战是手术器械或配件与机器人连接接口的频繁插拔。这些对接连接可能在每次手术或更换器械时进行插合和分离。为机器人设计的 I/O 连接器,如 I-PEX MINIDOCK™ 系列,采用坚固的外壳和定位功能(导向pin),确保即使在外科医生或护士手术中途更换工具时,也能快速且无误地插合。此类连接器支持数千次插拔循环,能够承受日常使用。此外,它们还被设计成可耐受消毒过程——要么自身可高压灭菌,要么支持在机器人器械上使用无菌一次性保护套。能够耐受蒸汽高压灭菌和强力消毒(采用如手术级不锈钢或高温聚合物等材料)的连接器在手术环境中至关重要。
总而言之,机器人辅助手术需要能够提供高带宽性能和绝对可靠性的连接器解决方案。从用于摄像头和传感器的带电磁干扰屏蔽功能的高速连接,到用于手术器械的重载对接连接器,合适的互连方案可以确保手术机器人无故障运行。通过采用 CABLINE®、NOVASTACK® 和 MINIDOCK™ 等专用连接器系列,设计工程师可以构建为外科医生提供无缝控制、为患者带来更安全、更小创伤的机器人手术系统。